

 联系我们
联系我们


今天下述文中所说的是ABB机器人的操作系统的一些必要的知识,操作机器人必须要学会机器人系统的知识,主要讲ABB机器人的RobotStudio创建系统与ABB机器人加载校对程序的的方法的及解析,使用RobotStudio创建系统 通常,
因为出厂时已安装一个系统,所以单一机器人系统无需创建系统。然而,如果 您的系统使用的是MultiMove选项,则您必须创建新系统,以定义系统中的所有机器 人。 如果因某些原因出产的系统无效,必须如下所示创建和加载一个新系统。 操作员手册-RobotStudio中给出了详细的步骤。对于MultiMove系统,Application manual-MultiMove中也描述了更详细的信息。
参考信息操作 启动RobotStudio然后单击SystemBuilder。1 RobotWare密钥是一个许可密钥, 它确定要使用的机器人型号和控制 器上运行的RobotWare选项。印 于控制器机柜内附纸片之上。 在创建新系统前,请确保符合以下条件: 因为出厂时已安装一个系统,所以单一机器人系统无需创建系统。然而,如果 您的系统使用的是MultiMove选项,则您必须创建新系统,以定义系统中的所有机器 人。 如果因某些原因出产的系统无效,必须如下所示创建和加载一个新系统。 操作员手册-RobotStudio中给出了详细的步骤。对于MultiMove系统,Application manual-MultiMove中也描述了更详细的信息。
• 必须在计算机上安装RobotWare媒体池。 • 如果要在控制器上运行系统,必须具有系统的 RobotWare密钥。 2 单击创建。3 一个指导创建新系统的向导将启动。 以上步骤有些为可选步骤,可跳 过。 请遵循向导中的步骤执行操作: •
输入名称和位置 • 输入RobotWare密钥 • 添加附加选项 • 修改选项 • 添加配置文件 • 添加文件至主目录 • 查看摘要 • 完成 4 在SystemBuilder(系统生成器)对话框的列表中选 择系统,然后单击DownloadtoController(下载到 控制器)
以打开对话框。 5 在对话框中,连接到控制器。6 单击Load(加载)以将新系统加载到控制器中。7 对于Doyouwanttoloadthesystem(您是否要加 载系统)的问题,请回答Yes(是)。
接通电源
主电源开关位于控制器/模块的正面。 • 对于PanelMountedController,开关的位置可能不同。 • 对于 DualController,每个模块都有一个开关。 下图显示了处于电源导通状态下的开关。
注意 在PanelMountedController上的电源开关可能看起来会有些差别。 参考信息操作 对于所有其他控制器,请转至步骤 2。 对于DualController,接通通往各DriveModule的 电源。 1 系统现在将启动,启动过程可能持 续数分钟。当
FlexPendant显示启 动窗口时,系统即可开始操作。 接通通往ControlModule的电源。2 如果系统没有启动,或者启动窗口 没有显示,请根据操作员手 册-IRC5故障排除中的详细描述 进行操作。 请参阅加载校准数据第页23。在开启
电源后,继续加载校准数据。
FlexPendant显示启 动窗口时,系统即可开始操作。 接通通往ControlModule的电源。2 如果系统没有启动,或者启动窗口 没有显示,请根据操作员手 册-IRC5故障排除中的详细描述 进行操作。 请参阅加载校准数据第页23。在开启
电源后,继续加载校准数据。
加载校准数据
校准数据通常存储在各机器人的串行测量板上,而无论该机器人是否运行**测量系 统(AbsoluteAccuracy选项已安装,AbsAcc)。当系统加电时,此数据通常会自动 传送到控制器,这种情况下操作员不需要执行任何操作。 确认正
确的SMB数据已加载到系统,如下所示。在MultiMove系统中,各机器人均 需重复此步骤。 操作 在FlexPendant上,点击ABB菜单,然后点击校准并选择一个机械单元。1 点击SMB内存,然后点击显示状态。2 显示SMB和控制器的数
据及其状态。 如果机柜内存和SMB内存标题下显示有效字样,则说明校准数据正确。3 否则,SMB板或控制器中的数据必须用正确的数据替换,如下所述: • 例如,如果SMB板已更换,则从控制器传送数据到SMB板。如果控制器已
更换, 则从SMB板传送数据到控制器。 • 点击SMB内存、更新,然后选择要更新的数据,开始传输数据。 在加载校准数据后,继续更新转数计数器。请参阅更新转数计数器第页24。
确的SMB数据已加载到系统,如下所示。在MultiMove系统中,各机器人均 需重复此步骤。 操作 在FlexPendant上,点击ABB菜单,然后点击校准并选择一个机械单元。1 点击SMB内存,然后点击显示状态。2 显示SMB和控制器的数
据及其状态。 如果机柜内存和SMB内存标题下显示有效字样,则说明校准数据正确。3 否则,SMB板或控制器中的数据必须用正确的数据替换,如下所述: • 例如,如果SMB板已更换,则从控制器传送数据到SMB板。如果控制器已
更换, 则从SMB板传送数据到控制器。 • 点击SMB内存、更新,然后选择要更新的数据,开始传输数据。 在加载校准数据后,继续更新转数计数器。请参阅更新转数计数器第页24。
更新转数计数器
在MultiMove系统中,各机器人均需重复此步骤。 参考信息操作 各轴的校准位置由校准标记指明。使用 FlexPendant上的控制杆,手动运行机器人到校 准位置附近。 1 注意!在将所有各轴定位到由校准标记指明的范围后,存储 转数
计数器设置。 2 如果转数计数器未正确更新,将导 致机器人定位不正确,从而造成损 坏或伤害! 在FlexPendant上,点击ABB菜单,然后点击校准。 选择要校准的机械单元。点击更新转数计数器并遵循 提供的说明操作。 因此每次
更新后应仔细检查校准位 置。
计数器设置。 2 如果转数计数器未正确更新,将导 致机器人定位不正确,从而造成损 坏或伤害! 在FlexPendant上,点击ABB菜单,然后点击校准。 选择要校准的机械单元。点击更新转数计数器并遵循 提供的说明操作。 因此每次
更新后应仔细检查校准位 置。
如何切断电源
主电源开关位于控制器/模块的正面。 • 对于PanelMountedController,开关的位置可能不同。 • 对于DualController,每个模块都有一个开关。 下图显示了处于电源断开状态下的开关。
en1000001317 参考信息操作 对于所有其他控制器,请转至步骤 2。 对于DualController,切断通往各驱动模块的电源1 系统即将于数分钟后关闭。切断通往 ControlModule的电源。2
24 3HAC027097-010修订:J ©版权所有2004-2012ABB。保留所有权利。
图示
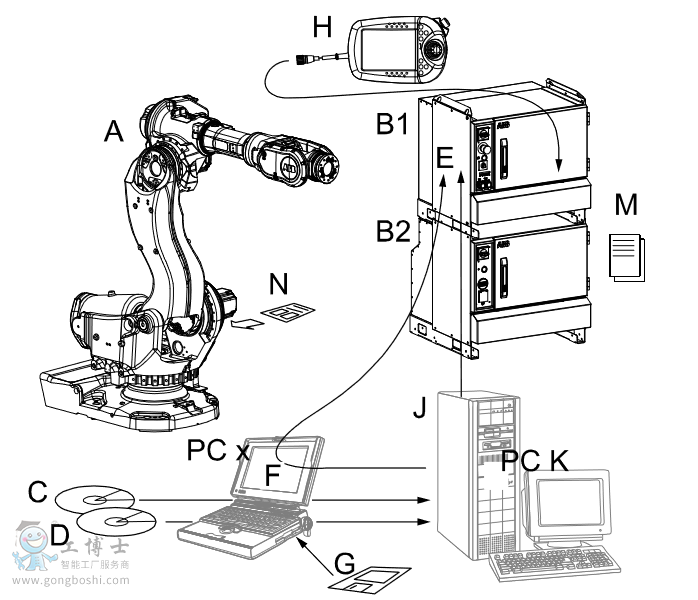
下图以框架模式介绍了出厂部件、安装部件的软件工具以及基本工作流程。
en0400000766
部件说明
参考描述 产品说明文档,M2004第页38 一节中指定的文档。 操纵器(所示为普通型号)A 产品说明文档,M2004第页38 一节中指定的文档。 IRC5ControlModule,包含机器人系统的控制电子装 置。 B1 产品说明文档,M2004第页38 一
中指定的文档。 IRC5DriveModule,包含机器人系统的电源电子装置. 在SingleCabinetController中,DriveModule包含 在单机柜中. B2 在MultiMove系统中有多个DriveModule。 RobotWareDVD包含什么是RobotWare?第页34一 节所
述的所有机器人软件以及RobotStudio安装软件 包。
更多技术支持请点击:http://abb-fws.gongboshi.com/
更多铲平信息请点击:ABB机器人
